Warp Drive
Tech & Art Lead, Project Manager
Mobile | Android
1
~7 Months
WArp Drive
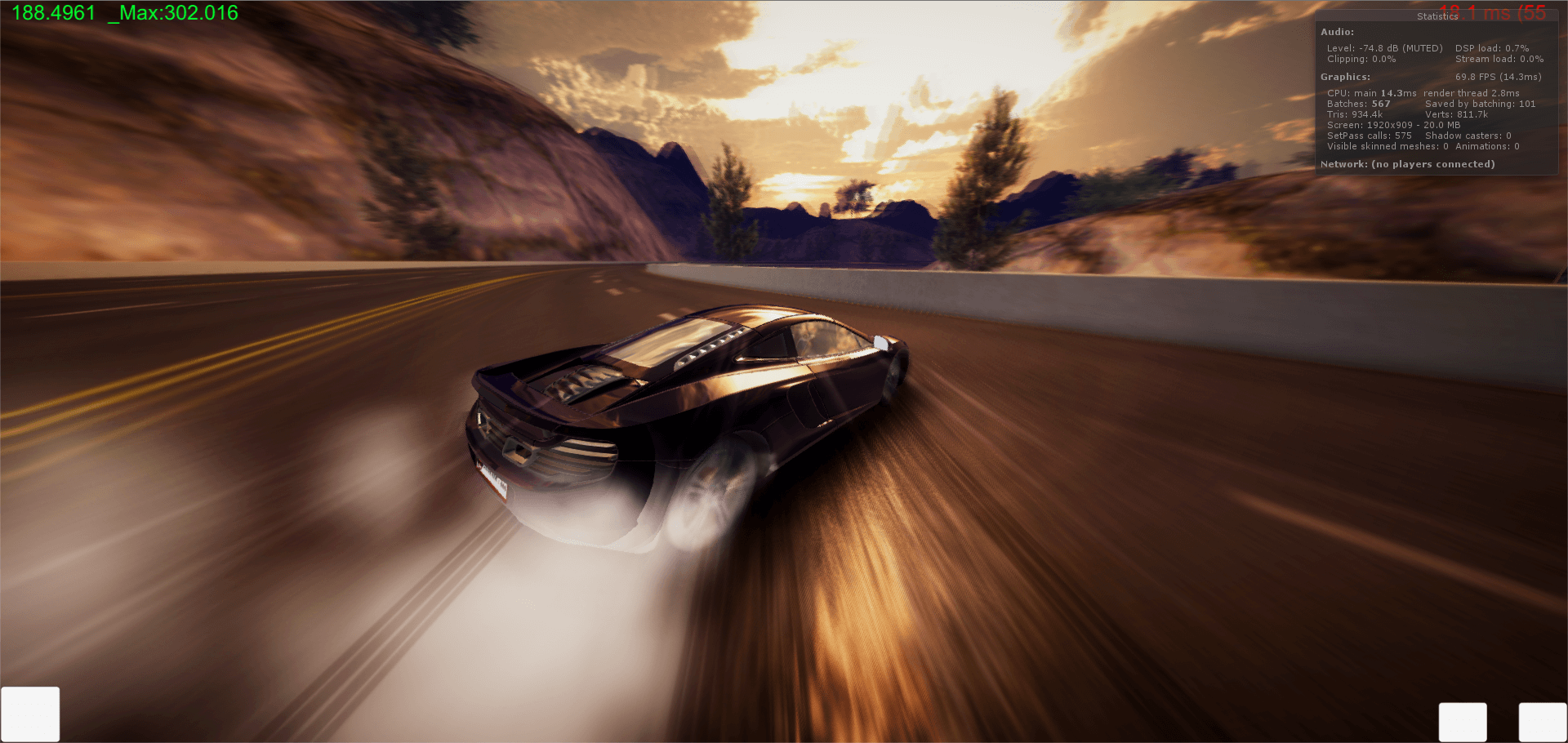
Warp Drive is an arcade racing game built for mobile, focused on responsive driving, smooth camera feel, and heavy performance optimization for large environments.
Overview
Project Overview:
This was a solo project where I handled everything from core gameplay programming to level design, AI systems, UI, and optimization. A key focus was pushing Unity performance on low-end Android hardware while maintaining visual clarity and responsiveness.
Target Test Device:
Infinix Note 3 (6.0” display, ~2GB RAM, MediaTek MT6753, Mali-T720 GPU, Android 6.0)
Key Responsibilities:
• Gameplay programming
• Vehicle physics & controller engineering
• Level design & terrain systems
• AI waypoint system
• Camera system
• UI design
• Rendering & performance optimization
• Basic multiplayer experimentation
Technical Break Down
Contributions
• Took a base car controller and heavily re-engineered it into a custom arcade-style vehicle system
• Reworked core movement logic (not just tuning values) to improve responsiveness, steering control, and drift feel
• Built a dynamic camera system where FOV and zoom are driven by a normalized speed-based formula to enhance the sensation of velocity at high speeds
• Implemented an AI waypoint system for racing opponents and track navigation
• Designed all systems with a focus on mobile performance, ensuring lightweight and stable gameplay on low-end devices
{kind=link}
{kind=link}
{kind=link}
• Learned and used Unity’s Terrain System for building large-scale environments
• Worked with the Gaia package to speed up world building and iteration
• Converted terrain into mesh-based setups where necessary for improved performance and control
• Optimized environments using:
• Mesh reduction and polygon optimization
• Chunking large environments into smaller, streamed sections
• Occlusion culling to improve performance on low-end devices
• Gained a deeper understanding of how level structure directly impacts performance in open-world style scenes
Mobile Rendering & Visual Optimization (PBR Focus):
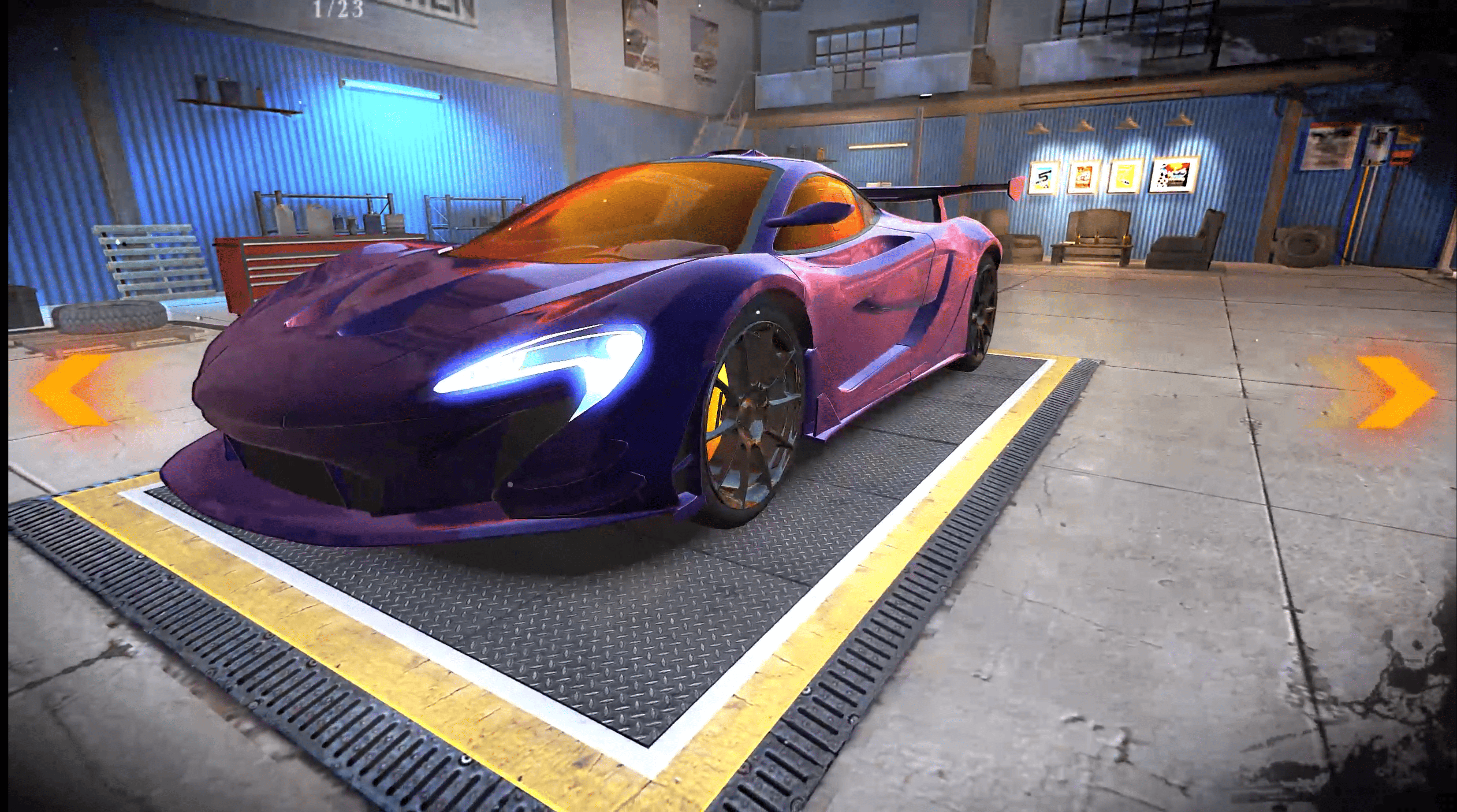
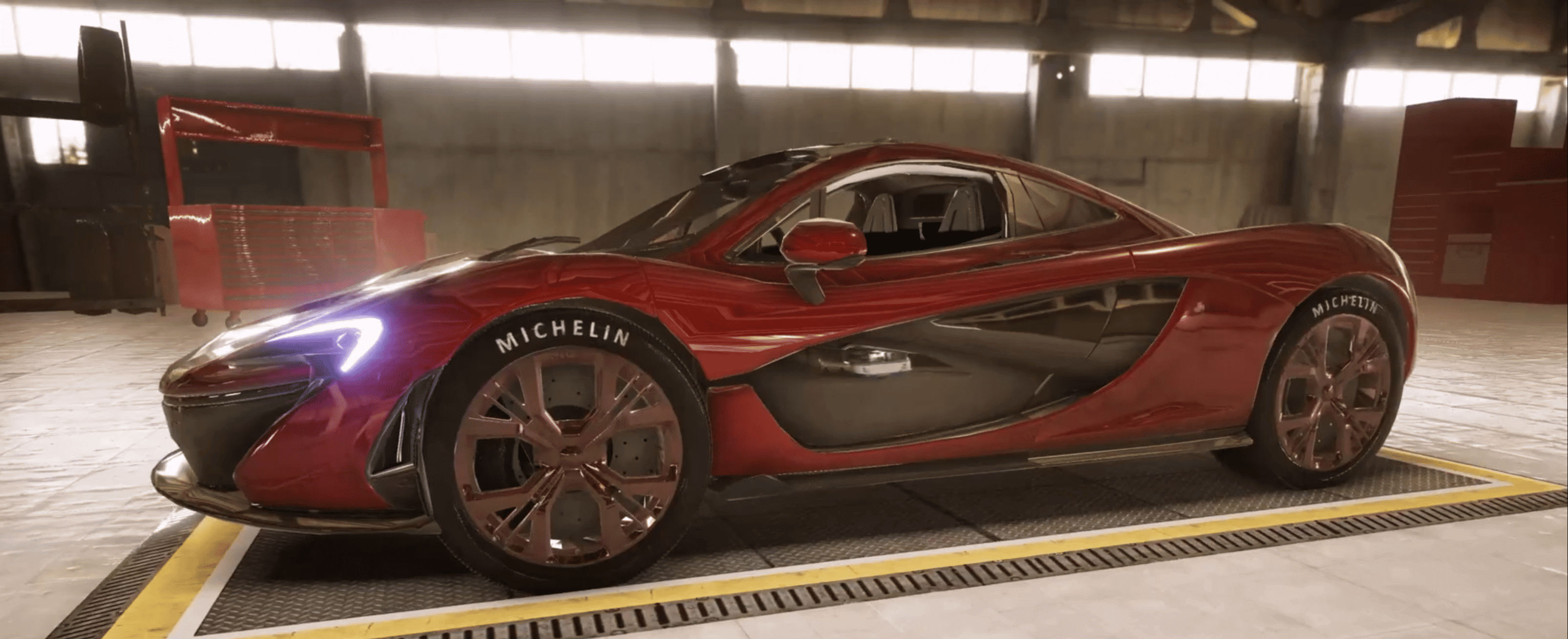
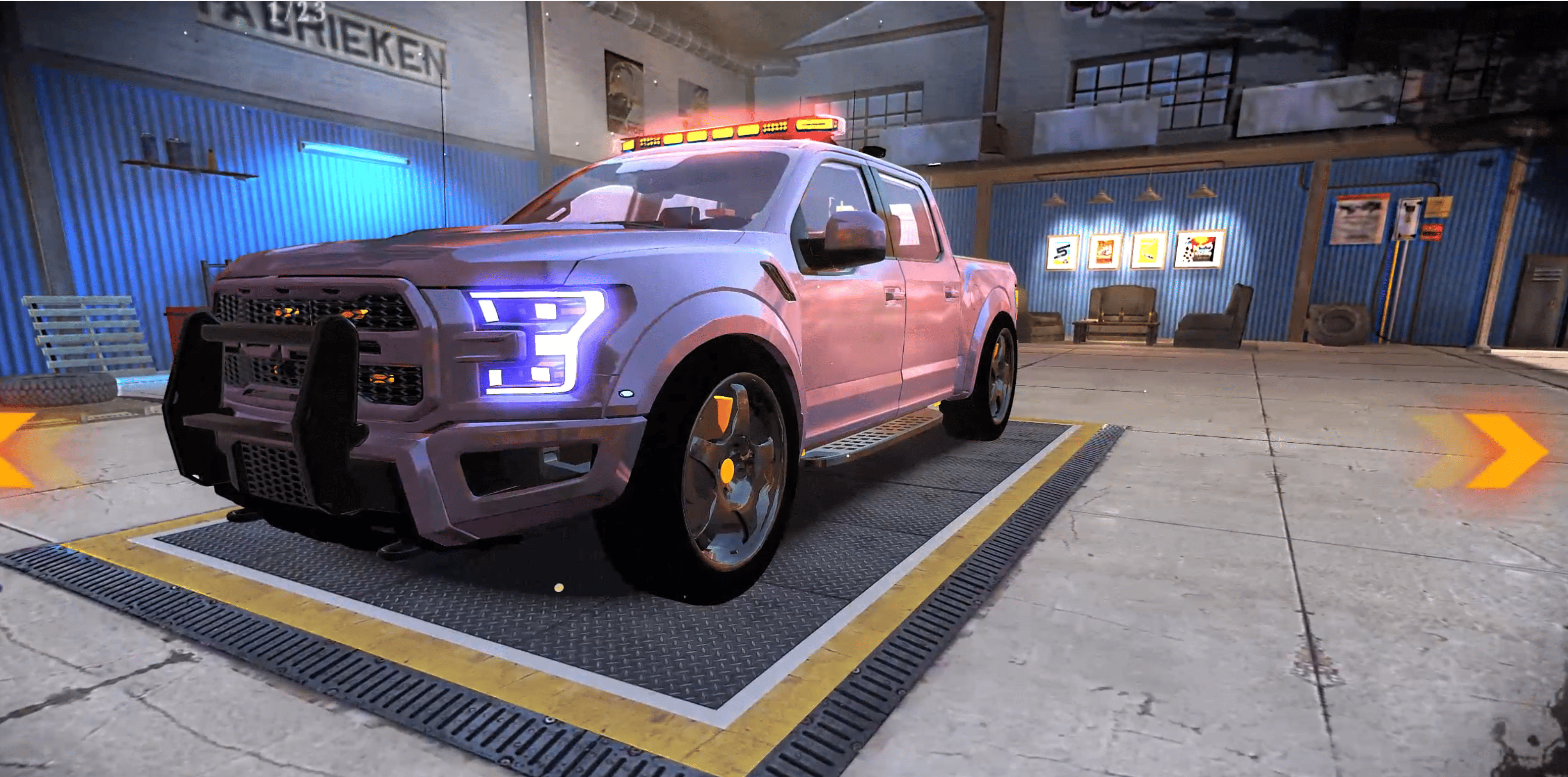
A major challenge was achieving realistic car visuals on mobile devices without sacrificing performance. I studied visual techniques used in games like Asphalt 8 and CSR Racing 2, along with real-world automotive paint structures such as multi-layer systems (base coat, metallic flakes, clear coat).
Through this research, I developed a strong understanding of physically based rendering (PBR) and the core principles behind photorealism, including:
• Energy-conserving lighting models
• Roughness vs specular response control
• The importance of reflection and environment lighting over raw geometric detail
• How micro-surface variation impacts perceived material quality
Implementation Approach:
• Used image-based lighting (IBL) instead of relying heavily on Unity’s real-time global illumination system (Unity Enlighten)
• Used baked reflection probes for consistent and stable environment reflections
• Focused on tuning material response rather than increasing geometry or texture resolution
Result:
• Achieved ~28–30 FPS on low-end Android hardware (Infinix Note 3 class device: ~2GB RAM, MT6753 CPU, Mali-T720 GPU)
• Maintained a convincing premium car visual quality under strict mobile performance constraints

AI Systems:
• Built a waypoint-based AI driving system for racing opponents
• Tuned AI behavior to feel competitive, readable, and fair during gameplay
• Ensured AI stability across different track layouts, speeds, and driving conditions
Multiplayer Experimentation:
• Set up a basic multiplayer prototype using UNet
• Experimented with syncing racing interactions in real time
• Kept the implementation lightweight due to mobile performance constraints and project scope limitations
UI Design & Implementation:
• Designed all UI elements for menus and in-game flow
• Focused on clarity and readability for mobile screen sizes
• Kept UI systems lightweight to minimize performance overhead and ensure smooth gameplay







Key REsults
Key Learnings & Outcomes:
• Learned Unity terrain workflows and large environment structuring techniques
• Gained hands-on experience optimizing for low-end Android devices (~2GB RAM class hardware)
• Developed a strong understanding of photorealism principles, including lighting, PBR, and reflection control rather than relying on raw detail
• Built a fully custom vehicle controller by heavily modifying a base system into an arcade-style driving experience
• Learned how camera systems can significantly influence the perception of speed and motion
• Gained early exposure to multiplayer systems using UNet and real-time synchronization challenges
• Although the project was eventually left incomplete due to a job transition, it became a strong foundation for mobile optimization, rendering systems, and vehicle gameplay design
Tech Stack
Technical Skills:
• Unity
• C#
• Custom Vehicle Controller (heavily re-engineered base system)
• AI Waypoint System
• Dynamic Speed-Based Camera System (FOV + zoom normalization)
• Unity Terrain System
• Gaia Terrain Workflow
• Mesh Optimization + Chunking System
• Occlusion Culling
• PBR / IBL Rendering Workflow
• UNet